 |













| MODEL: | |
|---|---|
| Quantité: | |
XHY
DLL
SPÉCIFICATION
ÉPICERIE FINE
ZHECONNECTEURS CIE., LTD DE JIANG DELI
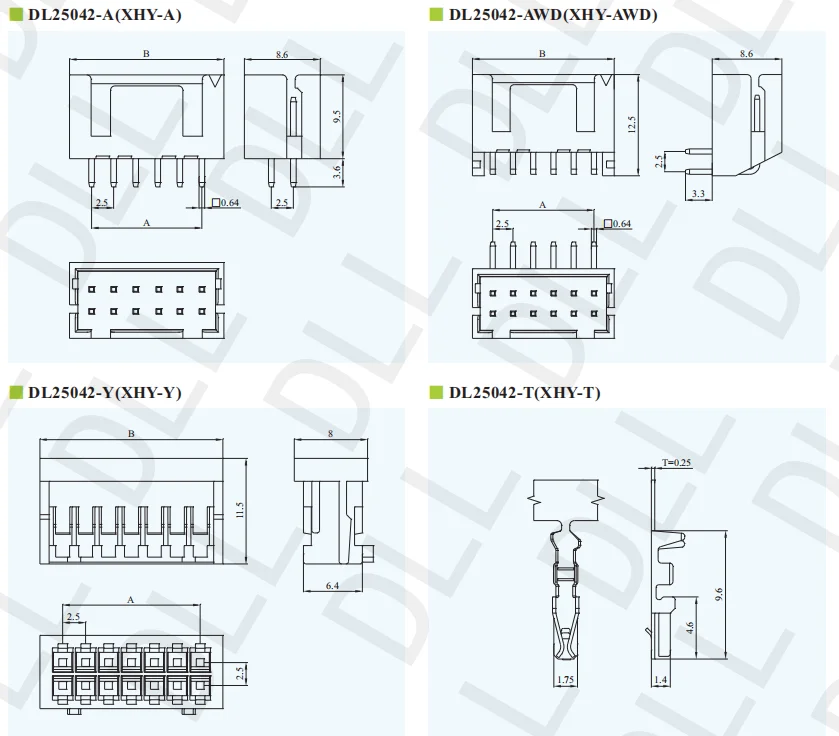
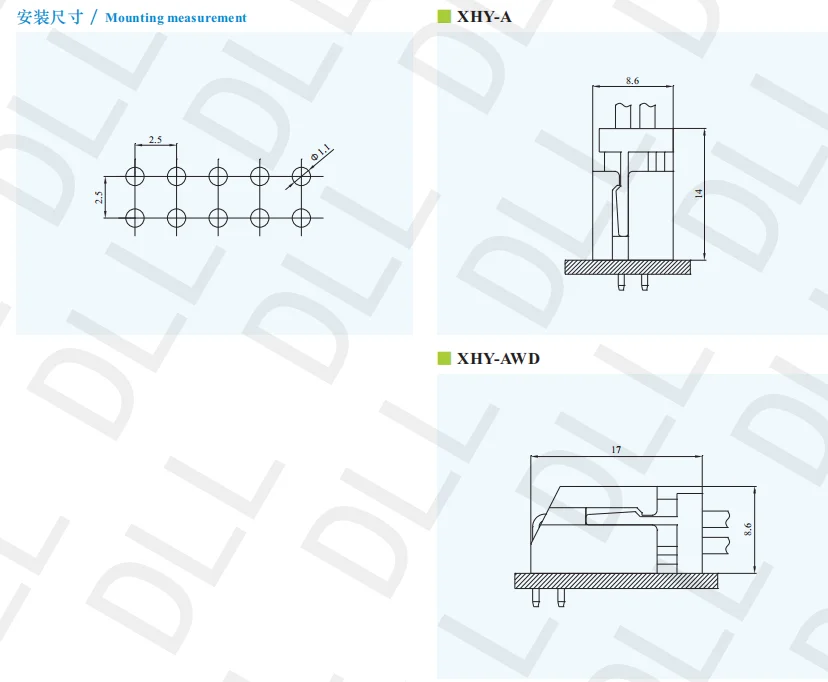
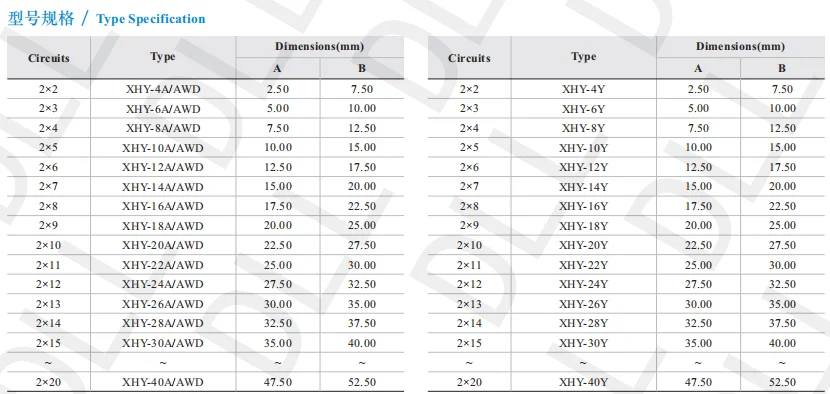
Remplacez le connecteur d'embase à broches xhy de 2,5 mm ; connecteur d'embase à broches xhy de 2,5 mm.
Tension nominale : | 250 V CA, CC |
Courant nominal : | 3A CA, CC |
Résistance des contacts : | 30 MΩ maximum |
Résistance d'isolation : | 1000 MΩ min |
Tension de tenue : | 650 V CA/minute |
Température: | -25℃~+85℃ |
MATÉRIEL
ÉPICERIE FINE
ZHECONNECTEURS CIE., LTD DE JIANG DELI
Logement: | (Nylon) UL94-V0(2) |
Terminal: | Bronze phosphoreux, étamé |
Tranche: | (Nylon) UL94-V0(2) |
Plus de produits à choisir:

Application
Système de contrôle du robot : dans le système d'entraînement commun, d'acquisition du signal du capteur et de contrôle du robot, le connecteur à aiguille droite XHY peut être utilisé pour connecter des composants tels que des moteurs, des encodeurs et des capteurs de force. Par exemple, le moteur est connecté au contrôleur commun du robot via un connecteur à broches droites pour obtenir un contrôle précis du mouvement des articulations ; L'encodeur renvoie les informations de position et de vitesse du joint au système de contrôle via un connecteur à aiguille droite, réalisant ainsi un contrôle en boucle fermée.
SPÉCIFICATION
ÉPICERIE FINE
ZHECONNECTEURS CIE., LTD DE JIANG DELI
Remplacez le connecteur d'embase à broches xhy de 2,5 mm ; connecteur d'embase à broches xhy de 2,5 mm.
Tension nominale : | 250 V CA, CC |
Courant nominal : | 3A CA, CC |
Résistance des contacts : | 30 MΩ maximum |
Résistance d'isolation : | 1000 MΩ min |
Tension de tenue : | 650 V CA/minute |
Température: | -25℃~+85℃ |
MATÉRIEL
ÉPICERIE FINE
ZHECONNECTEURS CIE., LTD DE JIANG DELI
Logement: | (Nylon) UL94-V0(2) |
Terminal: | Bronze phosphoreux, étamé |
Tranche: | (Nylon) UL94-V0(2) |
Plus de produits à choisir:
Application
Système de contrôle du robot : dans le système d'entraînement commun, d'acquisition du signal du capteur et de contrôle du robot, le connecteur à aiguille droite XHY peut être utilisé pour connecter des composants tels que des moteurs, des encodeurs et des capteurs de force. Par exemple, le moteur est connecté au contrôleur commun du robot via un connecteur à broches droites pour obtenir un contrôle précis du mouvement des articulations ; L'encodeur renvoie les informations de position et de vitesse du joint au système de contrôle via un connecteur à aiguille droite, réalisant ainsi un contrôle en boucle fermée.